Робот-депаллетизатор
Подробная информация о продукте
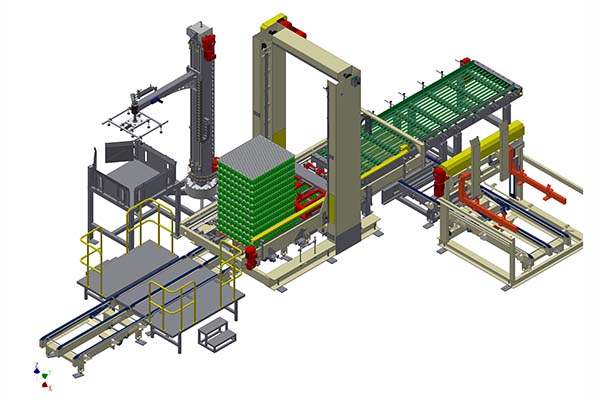
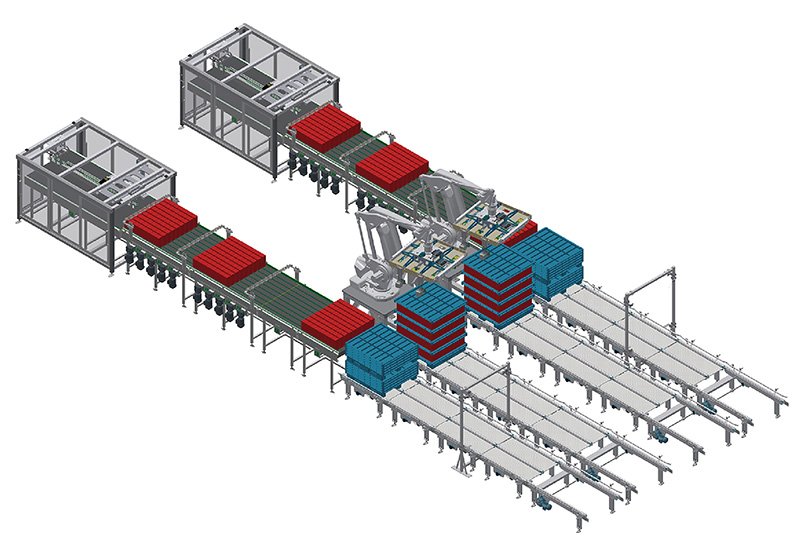
В процессе производства весь штабель продукции транспортируется цепным конвейером на станцию депаллетизации, и подъемный механизм поднимет весь поддон на высоту депаллетизации, после чего присосное устройство для межслойных листов подхватит лист и поместит его в накопитель листов, после этого передающий захват переместит весь слой продукции на конвейер, повторяя вышеуказанные действия до завершения депаллетизации всего поддона, и пустые поддоны отправятся в сборщик поддонов.
Приложение
Подходит для автоматической разгрузки ящиков, ПЭТ-бутылок, стеклянных бутылок, банок, пластиковых бочек, железных бочек и т. д.
Демонстрация продукта


3D-рисунок

Электрическая конфигурация
| Рука робота | АББ/КУКА/ФАНУК |
| ПЛК | Сименс |
| ЧРП | Данфосс |
| Серводвигатель | Элау-Сименс |
| Фотоэлектрический датчик | БОЛЬНОЙ |
| Пневматические компоненты | СМЦ |
| Сенсорный экран | Сименс |
| Низковольтное оборудование | Шнайдер |
| Терминал | Феникс |
| Мотор | ШИТЬ |
Технические параметры
| Модель | LI-RBD400 |
| Скорость производства | 24000 бутылок/час 48000 крышек/час 24000 бутылок/час |
| Источник питания | 3 x 380 переменного тока ±10%,50 Гц,3 фазы+N+PE. |
Больше видео-шоу
- Робот-депаллетизатор для бутылок с линией разделения и слияния
- Робот-депаллетизатор для коробок с линией разделения и слияния